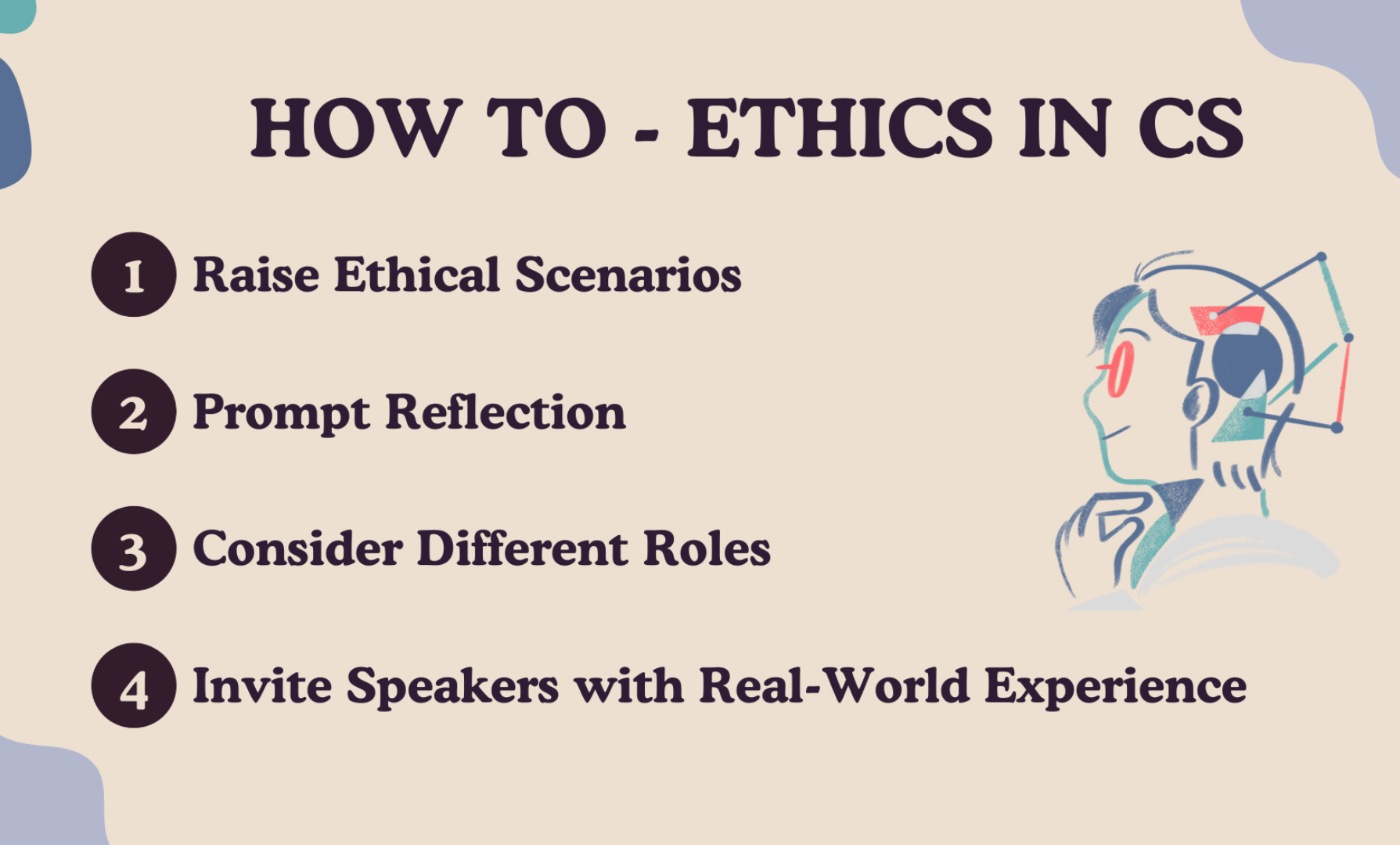
Further Integrating Ethics into Computer Science Courses
Fellowship Project
Developed a resource for computer science (CS) educators that highlights the importance of including ethics-related discussion and activities within CS courses, and offers activities on how to further integrate ethics into CS.
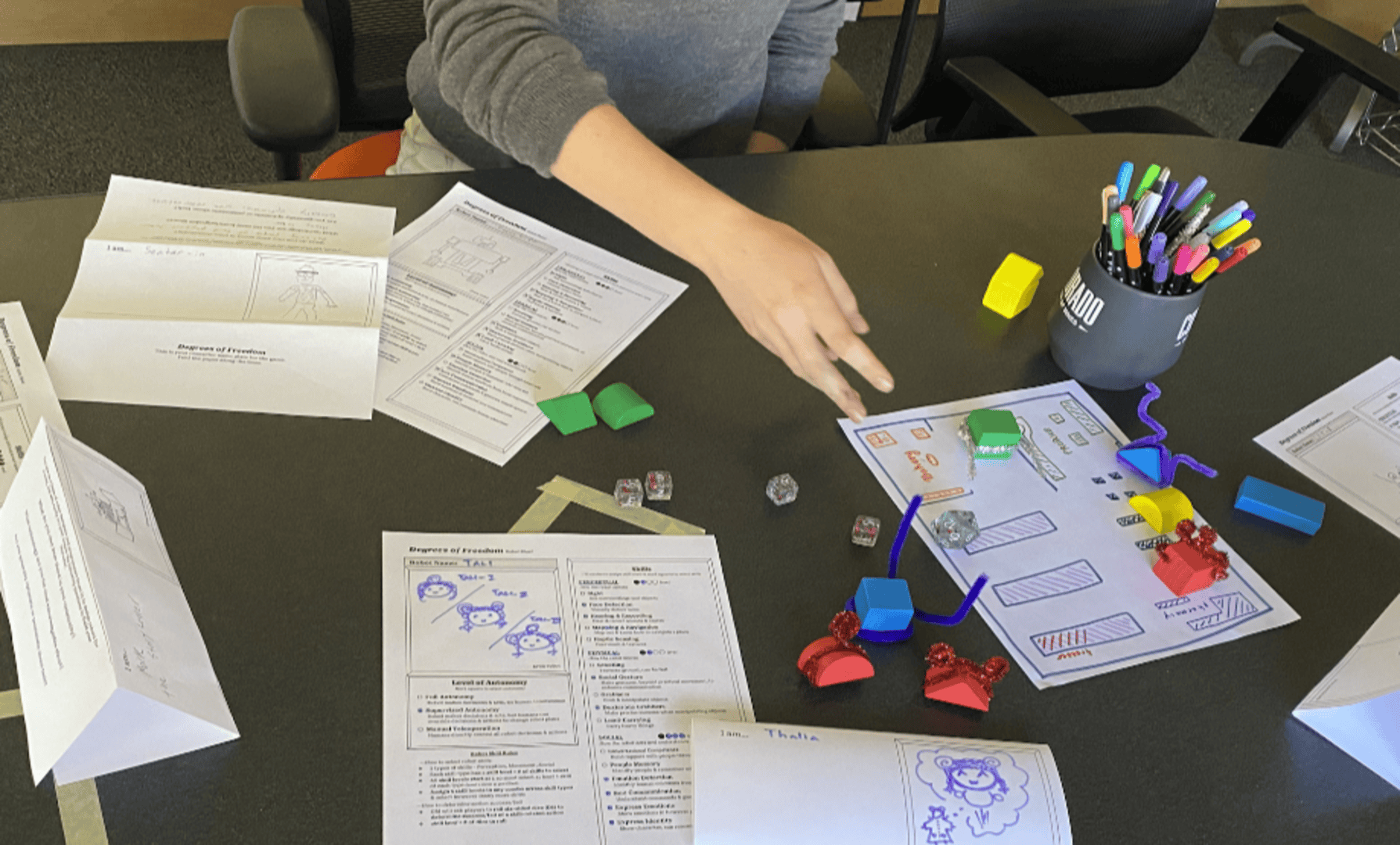
Storytelling Tech Literacy Game about Social Robots
Course Project
Designed and playtested a multiplayer interactive storytelling game that supports technology literacy about social robots.
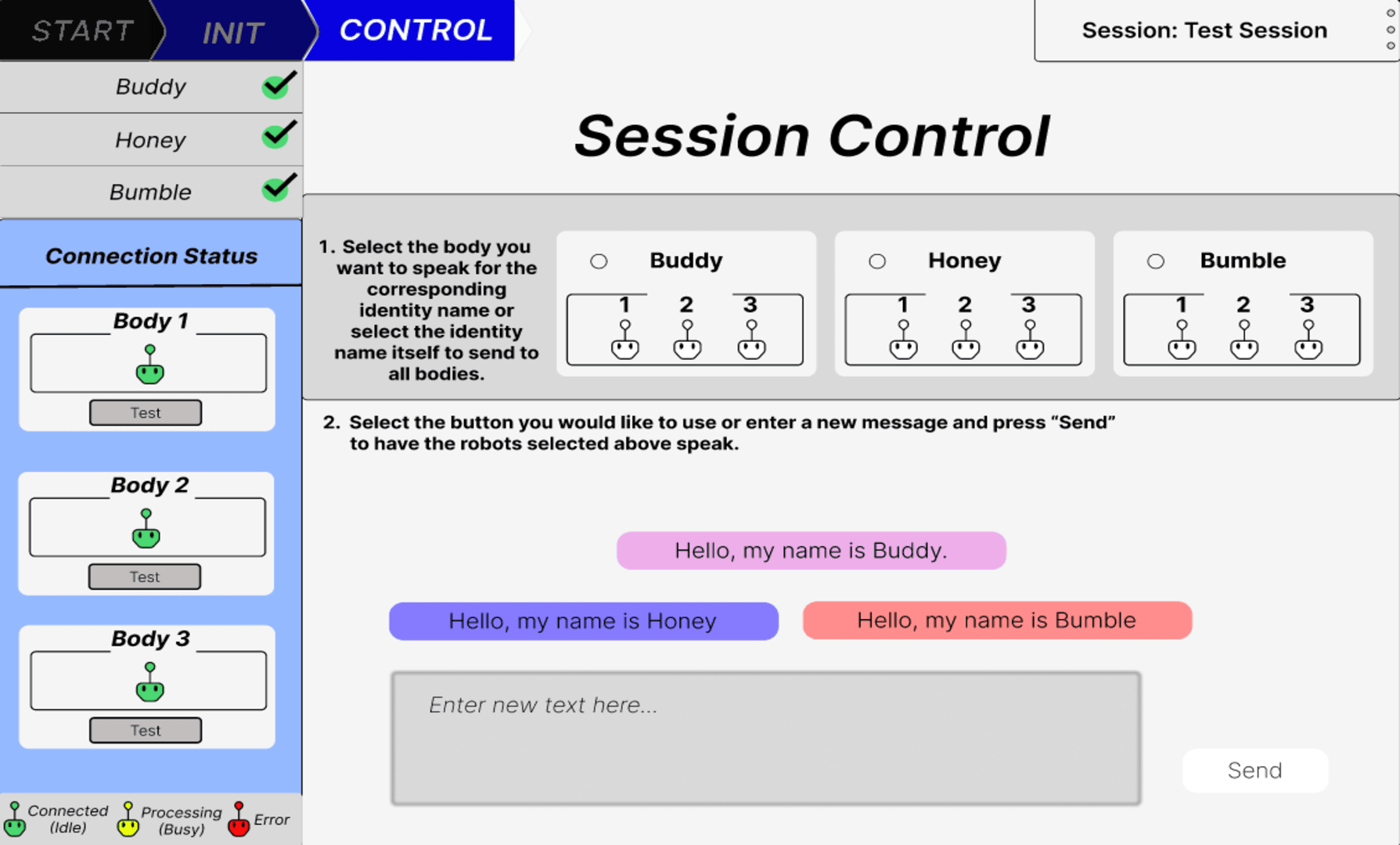
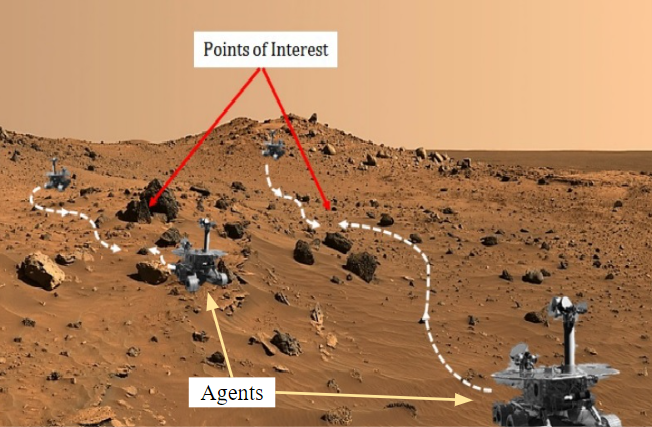
Multi-Robot Identity & Speech Control
Research
Prototyped a user interface to enable the control of multiple robots’ speech and identity presentation in human-robot interaction.